What is a Variational Autoencoder?
A Variational Autoencoder (VAE) is a type of generative model, meaning its primary purpose is to learn the underlying structure of a dataset so it can generate new, similar data.
Whether the data is images, raw audio clips, or 2D graphs of drug-like molecules, a VAE aims to capture the essential features that define the data distribution. Once trained, it should be able to create entirely new samples that resemble the training data without simply copying specific examples.
Introduced by Kingma and Welling in 2013 (Auto-Encoding Variational Bayes, Paper), VAEs are powerful tools for:
- Generation: Creating new data (images, music, text).
- Dimensionality Reduction: Compressing data into a much smaller, meaningful representation (a “latent space”).
- Imputation: Intelligently filling in missing data (e.g., denoising images).
Importantly, they aim to provide a structured and continuous latent space, which allows for smooth interpolation between data points and meaningful manipulations of generated samples (think: optimization).
TL;DR: The Complete PyTorch Implementation
For those who just want the code, here is a complete, modern VAE implementation in PyTorch. It features softplus standard deviation parameterization for numerical stability and a custom training step that handles the ELBO loss correctly.
import torch
import torch.nn as nn
import torch.nn.functional as F
from dataclasses import dataclass
@dataclass
class VAEOutput:
z: torch.Tensor
mu: torch.Tensor
std: torch.Tensor
x_recon: torch.Tensor
loss: torch.Tensor
loss_recon: torch.Tensor
loss_kl: torch.Tensor
class VAE(nn.Module):
def __init__(self, input_dim=784, hidden_dim=512, latent_dim=16):
super().__init__()
self.encoder = nn.Sequential(
nn.Linear(input_dim, hidden_dim),
nn.Tanh(),
nn.Linear(hidden_dim, hidden_dim),
nn.Tanh()
)
self.fc_mu = nn.Linear(hidden_dim, latent_dim)
self.fc_std = nn.Linear(hidden_dim, latent_dim)
self.decoder = nn.Sequential(
nn.Linear(latent_dim, hidden_dim),
nn.Tanh(),
nn.Linear(hidden_dim, hidden_dim),
nn.Tanh(),
nn.Linear(hidden_dim, input_dim)
)
def encode(self, x):
h = self.encoder(x)
mu = self.fc_mu(h)
# Softplus + epsilon for stable std deviation
std = F.softplus(self.fc_std(h)) + 1e-6
return mu, std
def reparameterize(self, mu, std):
eps = torch.randn_like(std)
return mu + eps * std
def decode(self, z):
return self.decoder(z)
def forward(self, x, kl_weight=1.0):
mu, std = self.encode(x)
z = self.reparameterize(mu, std)
x_recon = self.decode(z)
# 1. Reconstruction Loss (Binary Cross Entropy for MNIST)
# Sum over features, mean over batch
recon_loss = F.binary_cross_entropy_with_logits(x_recon, x, reduction='none').sum(dim=1).mean()
# 2. KL Divergence
# Analytic KL for Normal distributions
kl_loss = -0.5 * torch.sum(1 + torch.log(std**2) - mu**2 - std**2, dim=1).mean()
# 3. Total Loss (ELBO)
loss = recon_loss + (kl_weight * kl_loss)
return VAEOutput(z, mu, std, x_recon, loss, recon_loss, kl_loss)
# --- Training Loop Example ---
def train_step(model, batch, optimizer, kl_weight=1.0):
model.train()
optimizer.zero_grad()
# Forward pass
output = model(batch, kl_weight)
# Backward pass
output.loss.backward()
# Gradient clipping (recommended)
torch.nn.utils.clip_grad_norm_(model.parameters(), max_norm=1.0)
optimizer.step()
return output.loss.item()
The Core Idea: Learning to Generate
The VAE is built on a key assumption: our complex, high-dimensional data (like a $28 \x28$ pixel image, $\mathbf{x}$) is actually generated by some simpler, low-dimensional, unobserved variable (a “latent” variable, $\mathbf{z}$).
A Physical Metaphor: Water Molecules and Phase Diagrams
Consider a glass of water. At the microscopic level, you have more than $10^{24}$ $\text{H}_2\text{O}$ molecules bouncing around in an incredibly high-dimensional space. Each molecule has position, velocity, and interactions with its neighbors, computationally intractable to track directly. Yet we can describe the macroscopic behavior of all these molecules using just two simple variables: temperature and pressure. These two dimensions create a “phase diagram” that tells us whether our water will be ice, liquid, or vapor. The temperature and pressure are “latent variables” that capture the essential physics governing this complex molecular dance.

A VAE makes the same assumption: complex data (like images) emerges from simpler underlying factors. A handwritten digit might be generated by latent factors like “pen thickness,” “writing angle,” “digit style,” and “size,” a much simpler description than tracking all 784 pixel values independently.

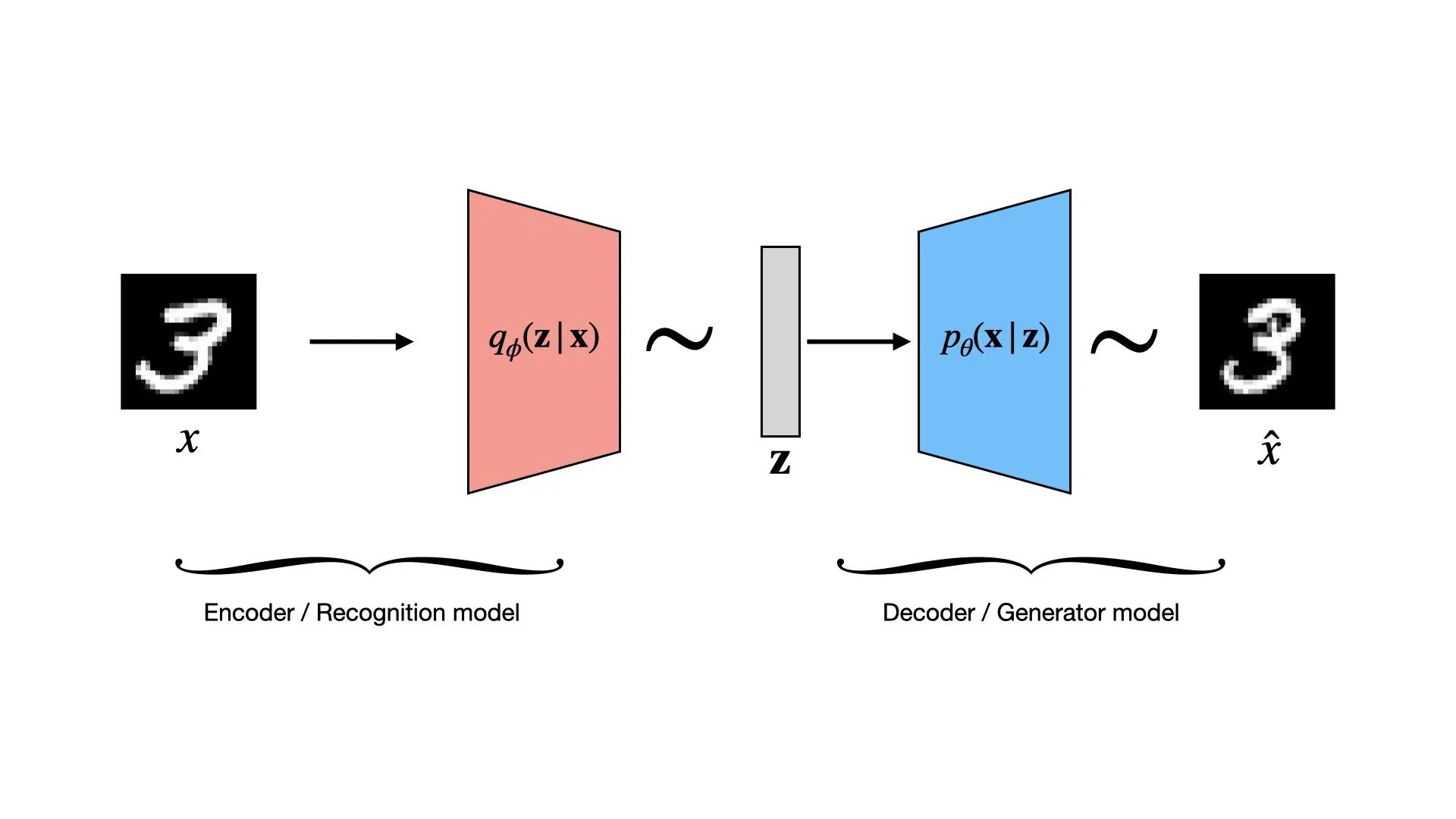
The VAE learns two functions: one that maps from complex data ($\mathbf{x}$) to these descriptive factors ($\mathbf{z}$), and another that maps from these factors back to the data. It accomplishes this with two main components, typically implemented as neural networks:
1. The Encoder (Recognition Model)
This network takes a complex data point $\mathbf{x}$ (an image) and determines the “knob settings” $\mathbf{z}$ that could explain or generate it. This allows us to compress or understand the data.
$$q_{\phi}(\mathbf{z} | \mathbf{x})$$
It’s like examining a container of molecules and summarizing their complex arrangement into key parameters like temperature and pressure.
Crucially, the encoder outputs the parameters of a probability distribution (a simple Gaussian) that describes $\mathbf{z}$.

For each input $\mathbf{x}$, the encoder network outputs:
- A vector of means, $\mathbf{\mu}$
- A vector of standard deviations, $\mathbf{\sigma}$
These parameters define our approximation $q_{\phi}(\mathbf{z} | \mathbf{x}) = \mathcal{N}(\mathbf{z} \mid \mathbf{\mu}, \mathbf{\sigma}^2\mathbf{I})$. We then sample from this distribution to get the $\mathbf{z}$ that we feed to the decoder. This probabilistic step is what forces the latent space to be continuous and structured. It forces similar inputs to map to nearby regions in latent space, enabling smooth interpolation and generation.
2. The Decoder (Generative Model)
This network learns the “generative process.” It takes a simple latent vector $\mathbf{z}$ and reconstructs the complex data $\mathbf{x}$. This allows us to generate new data by feeding it a random $\mathbf{z}$ and observing what image $\mathbf{x}$ it produces.
$$p_{\theta}(\mathbf{x} | \mathbf{z})$$
The decoder reverses the encoder: it takes the simple latent representation and “paints” the full, complex image from it. It’s like taking temperature and pressure values and producing a detailed arrangement of water molecules consistent with those conditions. The goal is to reproduce the exact input as closely as possible.
After training, we have two networks that can be used for a variety of purposes:
- Generation: If the latent space is well-structured, we can sample random $\mathbf{z}$ vectors from a simple distribution (like a standard normal) and feed them into the Decoder to generate new images. This is particularly useful for searching for data points with desired properties, like in drug discovery, where we might want to generate molecules with specific characteristics.
- Compression: The Encoder can compress complex data into a low-dimensional latent space, which can be useful for visualization or as a feature extractor for other tasks.
The “Variational” Problem
Calculating the true distribution of latent variables $p_{\theta}(\mathbf{z}|\mathbf{x})$ (the posterior) is mathematically intractable.
This intractability arises from Bayes’ theorem:
$$p_{\theta}(\mathbf{z} | \mathbf{x}) = \frac{p_{\theta}(\mathbf{x} | \mathbf{z}) p_{\theta}(\mathbf{z})}{p_{\theta}(\mathbf{x})}$$
Breaking down each component:
- $p_{\theta}(\mathbf{x} | \mathbf{z})$ is our decoder, which is straightforward to compute given our likelihood model.
- $p_{\theta}(\mathbf{z})$ is our prior over latent variables, typically a simple distribution like a standard normal, making it easy to compute.
- $p_{\theta}(\mathbf{x})$ is the marginal likelihood of the data. And here lies the problem. It requires integrating over all possible latent variables that could have generated $\mathbf{x}$: $$p_{\theta}(\mathbf{x}) = \int p_{\theta}(\mathbf{x} | \mathbf{z}) p_{\theta}(\mathbf{z}) d\mathbf{z}$$ It is the normalization factor that ensures the posterior is a valid probability distribution (i.e., sums to 1 over all $\mathbf{z}$).
This integral is intractable because it involves integrating over a high-dimensional latent space with a complex likelihood function. No closed-form solution exists, and numerical integration is computationally prohibitive.
This is where the “variational” approach provides the solution. We approximate the true posterior by learning an encoder, $q_{\phi}(\mathbf{z} | \mathbf{x})$, that serves as a variational approximation to this intractable true distribution. The VAE’s training process optimizes this approximation to be as accurate as possible, pushing this learned distribution closer to the true posterior.
The VAE Objective: A Balancing Act
To get these two networks (parameterized by $\theta$ and $\phi$) to work together, we train them jointly with a special loss function. This objective has two parts that balance two different goals:
1. Reconstruction Loss
$$E_{q_{\phi}(\mathbf{z} | \mathbf{x})}[\log p_{\theta}(\mathbf{x} | \mathbf{z})]$$
This term asks: “How well can we reconstruct our original image?” It forces the VAE to be good at its job. The process goes:
- Take an input point $\mathbf{x}$.
- Use the Encoder to get its latent representation $\mathbf{z} \sim q_{\phi}(\mathbf{z} | \mathbf{x})$.
- Use the Decoder to generate a new image $\mathbf{x}’$ from $\mathbf{z}$, $\mathbf{x}’ \sim p_{\theta}(\mathbf{x} | \mathbf{z})$.
- Compare $\mathbf{x}$ and $\mathbf{x}’$.
The reconstruction loss measures the difference between the original and the reconstructed image.

- For continuous inputs (like general images), this is often Mean Squared Error (MSE).
- For discrete inputs (like MNIST, where pixels are 0 or 1), we use Binary Cross-Entropy (BCE). We treat each pixel as an independent Bernoulli random variable (either on or off). The decoder outputs the logits (log-probabilities) for each pixel, and the BCE loss (e.g.,
F.binary_cross_entropy_with_logits) is the numerically stable way to compute the negative log-likelihood. - More generally, you can output parameters of a desired output distribution. What if you wanted a mixture of Gaussians? The decoder could output the means, variances, and mixture weights, and you could compute the negative log-likelihood accordingly.
This loss pushes the encoder to produce useful $\mathbf{z}$ vectors and pushes the decoder to learn how to interpret them accurately.
2. The KL Divergence (The Regularizer)
$$D_{KL}(q_{\phi}(\mathbf{z} | \mathbf{x}) || p_{\theta}(\mathbf{z}))$$
On its own, the reconstruction loss might “cheat.” The encoder could learn to map every image to a different, specific point in the latent space, essentially “memorizing” the data. While this minimizes reconstruction error, it creates a meaningless latent space that fails at generation.
The KL divergence term fixes this. It’s a regularizer that forces the latent space to be organized and smooth.
We force the encoder’s output, $q_{\phi}(\mathbf{z} | \mathbf{x})$, to be close to a simple, predefined prior distribution, $p_{\theta}(\mathbf{z})$. This prior is almost always a standard normal distribution because it is mathematically convenient, easy to sample from, and encourages a well-behaved latent space.

This regularization term acts as a penalty, measuring how much the encoder’s output distribution diverges from the simple prior. By minimizing this KL divergence, we encourage the model to:
- Avoid overfitting by preventing the encoder from memorizing specific locations for each input
- Create meaningful clusters where similar inputs map to nearby regions in the latent space
- Maintain continuity so that points close together in latent space (like different variations of the digit “7”) decode into visually similar outputs
This smooth, structured latent space is what enables generation: we can sample random points from our prior distribution and decode them into realistic new data.
Ultimately, the optimizer finds a balance between these two objectives: reconstructing the data well while keeping the latent space organized and regularized.
The Reparameterization Trick: Making it All Trainable
We have a problem. The training process requires sampling:
- Encoder produces $\mathbf{\mu}$ and $\mathbf{\sigma}$.
- We sample $\mathbf{z} \sim \mathcal{N}(\mathbf{\mu}, \mathbf{\sigma}^2\mathbf{I})$.
- Decoder uses $\mathbf{z}$ to reconstruct $\mathbf{x}’$.
- We calculate the loss.
The “sampling” step is a random, non-differentiable operation. We can’t backpropagate the reconstruction loss from the decoder through this random node to update the encoder’s weights.
The reparameterization trick makes the sampling process differentiable. We generate $\mathbf{z}$ deterministically by sampling a random noise vector and transforming it:
- Sample a random noise vector $\mathbf{\epsilon}$ from a simple, fixed distribution (e.g., the standard normal $\mathcal{N}(\mathbf{0}, \mathbf{I})$).
- Compute $\mathbf{z}$ as: $\mathbf{z} = \mathbf{\mu} + \mathbf{\sigma} \odot \mathbf{\epsilon}$
This simple change moves the randomness “outside” the network. The gradient can now flow deterministically from $\mathbf{z}$ back through the $\mathbf{\mu}$ and $\mathbf{\sigma}$ nodes to the encoder network. This is the key engineering insight that allows us to train the entire model end-to-end with standard backpropagation.
Where Does This Objective Come From? (The Math)
This two-part loss function is derived directly from the goal of maximizing the marginal likelihood of the data, $\log p_{\theta}(\mathbf{x})$.
For a single data point $\mathbf{x}^{(i)}$, we can write: $$\log p_{\theta}(\mathbf{x}^{(i)}) = D_{KL}(q_\phi(\mathbf{z} | \mathbf{x}^{(i)}) || p_{\theta}(\mathbf{z} | \mathbf{x}^{(i)})) + \mathcal{L}(\theta, \phi; \mathbf{x}^{(i)})$$
- The first term is the KL divergence between our encoder’s approximation and the (intractable) true posterior. This is non-negative, and unfortunately we cannot compute it.
- The second term, $\mathcal{L}$, is the Variational Lower Bound (also known as the Evidence Lower Bound, or ELBO). Since the KL term is $\ge 0$, we know that $\log p_{\theta}(\mathbf{x}^{(i)}) \ge \mathcal{L}$.
By maximizing this lower bound $\mathcal{L}$, we push up the “floor” on the true likelihood of our data. This is a problem we can solve.
When we expand this $\mathcal{L}$ term, we get our famous two-part objective:
$$\mathcal{L}(\theta, \phi; \mathbf{x}^{(i)}) = E_{q_{\phi}(\mathbf{z} | \mathbf{x}^{(i)})}[\log p_{\theta}(\mathbf{x}^{(i)} | \mathbf{z})] - D_{KL}(q_\phi(\mathbf{z} | \mathbf{x}^{(i)}) || p_{\theta}(\mathbf{z}))$$
- Term 1: The expected log-likelihood of reconstructing $\mathbf{x}^{(i)}$ from $\mathbf{z}$. Maximizing this is the same as minimizing the Reconstruction Loss.
- Term 2: The negative KL divergence between our encoder and the simple prior. Maximizing this is the same as minimizing the KL Divergence Loss.
Thus, the VAE’s objective balances these two critical goals: faithfully reconstructing the data while maintaining a simple, regularized latent structure that is useful for generation.
From ELBO to Practical Loss
Remember, our goal is to maximize the ELBO:
$$\mathcal{L}(\theta, \phi; \mathbf{x}) = E_{q_{\phi}(\mathbf{z} | \mathbf{x})}[\log p_{\theta}(\mathbf{x} | \mathbf{z})] - D_{KL}(q_\phi(\mathbf{z} | \mathbf{x}) || p_{\theta}(\mathbf{z}))$$
Since deep learning libraries are built to minimize a loss function, we simply flip the sign and minimize the negative ELBO ($-\mathcal{L}$).
This gives us our final, practical loss function:
$$\text{Loss} = -\mathcal{L} = -E_{q_{\phi}(\mathbf{z} | \mathbf{x})}[\log p_{\theta}(\mathbf{x} | \mathbf{z})] + D_{KL}(q_\phi(\mathbf{z} | \mathbf{x}) || p_{\theta}(\mathbf{z}))$$
This is the function you actually implement. Minimizing this loss achieves both of our goals:
- It minimizes the Reconstruction Loss (which is the same as maximizing the log-likelihood).
- It minimizes the KL Divergence, forcing the encoder to match the prior.
Modern PyTorch VAE Implementation
Now that we understand the VAE architecture and objective, let’s implement a modern VAE in PyTorch. I’ll focus primarily on the model and loss function here, though the full code is available on GitHub.
My VAE implementation uses an output dataclass and a VAE class extending nn.Module.
"""Variational Autoencoder (VAE) model implementation."""
from dataclasses import dataclass
import torch
import torch.nn as nn
import torch.nn.functional as F
def get_activation(activation: str) -> nn.Module:
"""Get activation function by name."""
activation_lower = activation.lower()
ACTIVATION_MAP = {
"relu": nn.ReLU(),
"tanh": nn.Tanh(),
"sigmoid": nn.Sigmoid(),
"leaky_relu": nn.LeakyReLU(),
"elu": nn.ELU(),
"gelu": nn.GELU(),
}
if activation_lower not in ACTIVATION_MAP:
supported = ", ".join(ACTIVATION_MAP.keys())
raise ValueError(
f"Unsupported activation '{activation}'. Supported: {supported}"
)
return ACTIVATION_MAP[activation_lower]
@dataclass
class VAEConfig:
"""VAE model configuration specifying architecture and behavior."""
hidden_dim: int
latent_dim: int
input_shape: tuple[int, int, int] = (1, 28, 28) # Default: MNIST
activation: str = "tanh" # Default: tanh, what was used in the original VAE paper
use_softplus_std: bool = False # Whether to use softplus for std parameterization
n_samples: int = 1 # Number of latent samples per input during training
@dataclass
class VAEOutput:
"""VAE forward pass output containing all relevant tensors and optional losses."""
x_logits: torch.Tensor
z: torch.Tensor
mu: torch.Tensor
std: torch.Tensor
x_recon: torch.Tensor | None = None
loss: torch.Tensor | None = None
loss_recon: torch.Tensor | None = None
loss_kl: torch.Tensor | None = None
class VAE(nn.Module):
"""Variational Autoencoder with support for deterministic and probabilistic reconstruction."""
DEFAULT_EPS = 1e-8
def __init__(self, config: VAEConfig) -> None:
"""Initialize VAE with given configuration.
Args:
config: VAE configuration specifying architecture and behavior
"""
super().__init__()
self.config = config
# Build encoder: input -> hidden -> latent parameters (mu, sigma)
self.encoder = nn.Sequential(
nn.Flatten(),
nn.Linear(
int(torch.prod(torch.tensor(config.input_shape))), config.hidden_dim
),
get_activation(config.activation),
nn.Linear(config.hidden_dim, config.latent_dim * 2),
)
# Build decoder: latent -> hidden -> reconstructed input
self.decoder = nn.Sequential(
nn.Linear(config.latent_dim, config.hidden_dim),
get_activation(config.activation),
nn.Linear(
config.hidden_dim, int(torch.prod(torch.tensor(config.input_shape)))
),
nn.Unflatten(1, config.input_shape),
)
def encode(self, x: torch.Tensor) -> tuple[torch.Tensor, torch.Tensor]:
"""Encode input to latent distribution parameters."""
encoder_output = self.encoder(x)
mu, sigma = torch.chunk(encoder_output, 2, dim=-1)
return mu, sigma
def decode(self, z: torch.Tensor) -> torch.Tensor:
"""Decode latent representation to reconstruction logits"""
return self.decoder(z)
def reparameterize(self, mu: torch.Tensor, std: torch.Tensor) -> torch.Tensor:
"""Apply reparameterization trick for differentiable sampling."""
epsilon = torch.randn_like(std)
return mu + std * epsilon
def forward(
self,
x: torch.Tensor,
compute_loss: bool = True,
reconstruct: bool = False,
eps: float = DEFAULT_EPS,
) -> VAEOutput:
"""Forward pass through the VAE.
Args:
x: Input tensor of shape (batch_size, *input_shape)
compute_loss: Whether to compute VAE loss components
reconstruct: Whether to return reconstructions or distributions
eps: Small epsilon value for numerical stability
Returns:
VAEOutput containing all relevant tensors and optionally computed losses
"""
# Prepare input for multiple sampling if needed
x_expanded = self._expand_for_sampling(x) if self.config.n_samples > 1 else x
# Encode and sample from latent space
mu, sigma = self.encode(x)
std = self._sigma_to_std(sigma, eps=eps)
mu_expanded, std_expanded = self._expand_latent_params(mu, std)
z = self.reparameterize(mu_expanded, std_expanded)
# Decode latent samples
x_logits = self.decode(z)
# Create output object
output = VAEOutput(
x_logits=x_logits,
z=z,
mu=mu,
std=std,
x_recon=torch.sigmoid(x_logits) if reconstruct else None,
)
# Compute losses if requested
if compute_loss:
loss, loss_recon, loss_kl = self._compute_loss(
x_expanded, x_logits, mu, sigma, std
)
output.loss = loss
output.loss_recon = loss_recon
output.loss_kl = loss_kl
return output
# ==================== Helper Methods ====================
def _sigma_to_std(
self, sigma: torch.Tensor, eps: float = DEFAULT_EPS
) -> torch.Tensor:
"""Convert sigma parameter to standard deviation."""
if self.config.use_softplus_std:
return F.softplus(sigma) + eps
else:
return torch.exp(0.5 * sigma) # sigma represents log-variance
def _expand_for_sampling(self, x: torch.Tensor) -> torch.Tensor:
"""Expand input tensor for multiple sampling."""
shape_dims = [1] * len(self.config.input_shape)
x_expanded = x.unsqueeze(1).repeat(1, self.config.n_samples, *shape_dims)
return x_expanded.view(-1, *self.config.input_shape)
def _expand_latent_params(
self, mu: torch.Tensor, std: torch.Tensor
) -> tuple[torch.Tensor, torch.Tensor]:
"""Expand latent parameters for multiple sampling."""
if self.config.n_samples == 1:
return mu, std
mu_expanded = (
mu.unsqueeze(1)
.repeat(1, self.config.n_samples, 1)
.view(-1, self.config.latent_dim)
)
std_expanded = (
std.unsqueeze(1)
.repeat(1, self.config.n_samples, 1)
.view(-1, self.config.latent_dim)
)
return mu_expanded, std_expanded
# ==================== Loss Computation ====================
def _compute_loss(
self,
x: torch.Tensor,
x_logits: torch.Tensor,
mu: torch.Tensor,
sigma: torch.Tensor,
std: torch.Tensor,
) -> tuple[torch.Tensor, torch.Tensor, torch.Tensor]:
"""Compute VAE loss components for deterministic reconstruction."""
loss_recon = self._compute_reconstruction_loss(x, x_logits)
loss_kl = self._compute_kl_loss(mu, sigma, std)
return loss_recon + loss_kl, loss_recon, loss_kl
def _compute_reconstruction_loss(
self, x: torch.Tensor, x_logits: torch.Tensor
) -> torch.Tensor:
"""Compute reconstruction loss using binary cross-entropy."""
return F.binary_cross_entropy_with_logits(
x_logits, x, reduction="sum"
) / x.size(0)
def _compute_kl_loss(
self,
mu: torch.Tensor,
sigma: torch.Tensor,
std: torch.Tensor,
eps: float = DEFAULT_EPS,
) -> torch.Tensor:
"""Compute KL divergence between latent distribution and standard normal prior."""
# Analytical KL: KL(N(μ,σ²) || N(0,1)) = 0.5 * Σ(μ² + σ² - 1 - log(σ²))
if self.config.use_softplus_std:
# sigma is just the raw output, need to use std directly: σ
kl_per_sample = 0.5 * torch.sum(
mu.pow(2) + std.pow(2) - 1 - torch.log(std.pow(2) + eps), dim=1
)
else:
# sigma represents log-variance parameterization: log(σ²)
kl_per_sample = 0.5 * torch.sum(mu.pow(2) + sigma.exp() - 1 - sigma, dim=1)
return kl_per_sample.mean()
Loss Scaling
Both components of the VAE loss should be summed over data dimensions and averaged over the batch size. A common mistake is using the reduction="mean" option in PyTorch loss functions, which averages over all elements in the tensor.
- The KL Divergence (
loss_kl) is a penalization term. Each dimension of the latent space has the potential to add complexity and deviate from the prior. As you increase the latent dimensionality, you typically see the KL loss increase in magnitude. That’s the cost of having a more expressive latent space. - The Reconstruction Loss (
loss_recon) measures how well the model reconstructs the input data, and it should scale with input dimensionality (this can bias the model toward better reconstruction for higher-dimensional data).
In the case of MNIST, if we used reduction="mean" for BCE, it would be averaged over all $784 \x\text{batch size}$ pixels, making it tiny compared to the KL loss. The KL term would dominate, and the model would learn to ignore the input, potentially leading to posterior collapse.
While modern optimizers can handle a variety of scenarios and you can still learn effective models with imperfect scaling, the original VAE paper used the scaling described above, and I recommend following that convention.
Mitigating Posterior Collapse: KL Annealing/Warmup
One common issue in training VAEs, especially with powerful decoders (like RNNs or deep CNNs), is posterior collapse. This happens when the KL term dominates the loss early in training. The model quickly learns to just output the prior distribution ($q(z|x) \approx p(z)$) to drive the KL loss to zero, effectively ignoring the latent code $z$. The decoder then becomes a powerful autoregressive model that ignores the latent input.
To prevent this, we often use KL Annealing (or Warmup). We introduce a weight $\beta$ for the KL term that starts at 0 and slowly increases to 1 over the first $N$ steps or epochs.
$$ \mathcal{L} = \mathcal{L}_{recon} + \beta \cdot D_{KL} $$
This allows the model to focus purely on reconstruction first (using the full latent capacity), and then slowly adds the regularization pressure.
# Simple Linear Annealing Scheduler
def get_kl_weight(step, total_steps, max_val=1.0):
val = (step / total_steps) * max_val
return min(max(val, 0.0), max_val)
# In your training loop:
for epoch in range(epochs):
beta = get_kl_weight(epoch, warmup_epochs)
loss = recon_loss + beta * kl_loss
Parameterizing Standard Deviation
def _sigma_to_std(self, sigma: torch.Tensor, eps: float = DEFAULT_EPS) -> torch.Tensor:
"""Convert sigma parameter to standard deviation."""
if self.config.bound_std is not None:
return torch.sigmoid(sigma) * self.config.bound_std + eps
elif self.config.use_softplus_std:
return F.softplus(sigma) + eps
else:
return torch.exp(0.5 * sigma) # sigma represents log-variance
Parameterizing the mean of the latent distribution is straightforward since $\mu \in \mathbb{R}$. However, the standard deviation $\sigma$ must be strictly positive (as must the variance $\sigma^2$). This type of constrained optimization is challenging for neural networks.
Log-Variance One common approach is to have the network output the log-variance ($\log \sigma^2$). This is what the original VAE paper did. The idea is to allow the network to output any real number and treat that value as the log-variance, $s = \log \sigma^2$. We can then compute the standard deviation as $\sigma = \exp(0.5 s)$, which is always positive.
The KL divergence formula simplifies nicely with this parameterization:
$$ \text{KL}( \mathcal{N}(\mu, \sigma^2) || \mathcal{N}(0, 1) ) = \frac{1}{2} \sum_{i=1}^d (\mu_i^2 + \sigma_i^2 - 1 - \log \sigma_i^2) $$
0.5 * torch.sum(mu.pow(2) + s.exp() - 1 - s, dim=1)
Softplus Standard Deviation
An alternative is to have the network output $\sigma$ directly. This must be handled with care to ensure positivity. Strictly positive activations like softplus are required. Activations like ReLU can output zero, leading to numerical instability (during training) and deterministic behavior (during sampling). Additionally, adding a small epsilon value ensures numerical stability by preventing $\sigma$ from being exactly zero.
The KL divergence formula becomes slightly more complex:
0.5 * torch.sum(
mu.pow(2) + std.pow(2) - 1 - torch.log(std.pow(2) + eps), dim=1
)
Bounded Standard Deviation
Another option is to bound the standard deviation to a maximum value using a sigmoid transformation (or similar). This replaces mapping to $(0, \infty)$ with mapping to $(0, \text{bound})$. This helps prevent extremely high variance values that might destabilize training, while limiting the expressiveness of the latent distribution. Like with softplus, adding a small epsilon ensures numerical stability by preventing $\sigma$ from being exactly zero or approaching it too closely.
Gradient Behavior All parameterizations can work well in practice and have different gradient behaviors. Think of $g(s)$ as a transformation function from the network output to the proper domain of $\sigma$ (or $\sigma^2$); in the log-variance case, $g(s) = \exp(s)$, while in the softplus case, $g(s) = \text{softplus}(s) + \epsilon$.
The gradient of the loss with respect to these outputs can be written using the chain rule:
$$ \frac{\partial \mathcal{L}}{\partial s} = \frac{\partial \mathcal{L}}{\partial \sigma} \cdot \frac{\partial g(s)}{\partial s} $$
where $\frac{\partial g(s)}{\partial s}$ is the derivative of the transformation function.
We need to guard against two pathological cases:
- $\frac{\partial g(s)}{\partial s} \rightarrow 0$: This leads to vanishing gradients, making it hard for the network to learn.
- $\frac{\partial g(s)}{\partial s} \rightarrow \infty$: This leads to exploding gradients, causing instability during training and potentially divergence.
The log-variance parameterization, with its exponential transformation that is its own derivative, exhibits both issues at extreme values. If $s \rightarrow -\infty$, then $\sigma \rightarrow 0$ and the gradient vanishes. If $s \rightarrow \infty$, then $\sigma \rightarrow \infty$ and the gradient explodes. Since the interval $(0, 1)$ is mapped to $(-\infty, 0)$ in log-space, it’s much more difficult for the network to drive $\sigma$ to small values. In practice, exploding gradients at high values have been more problematic in my experience. Gradient clipping, learning rate scheduling, and clamping the log-variance output to a maximum value can help mitigate this.
What about softplus? The derivative of softplus is the sigmoid function, which smoothly maps $(-\infty, \infty)$ to $(0, 1)$. Gradients are always bounded by unity, preventing explosion (barring explosion from other parts of the network). However, as $s \rightarrow -\infty$, the gradient approaches zero, leading to vanishing gradients. Adding a small epsilon helps mitigate this, ensuring that $\sigma$ never gets too close to zero. Nonetheless, learning can still slow down.
For bounded standard deviation, the derivative of the sigmoid function is also bounded, preventing exploding gradients. (The gradient of sigmoid is defined in terms of itself: $\text{sig}’(x) = \text{sig}(x)(1 - \text{sig}(x))$; its maximum value is $0.25$ at $x=0$.)

Experiments
2D MNIST VAE with Different Std. Dev. Parameterizations
First, let’s run an experiment that is close to what was done in the original VAE paper. We’ll use MNIST as our dataset, a simple feedforward architecture with tanh activations, and the log-variance parameterization for the latent distribution.
Some of the differences from the original paper include:
- Using a hidden size of 512 (the original used 500)
- Using the AdamW optimizer (the original used vanilla Adagrad)
- Applying similar weight decay, doing so quite differently due to the optimizer change
- Focusing primarily on 2D latent spaces (for now)
This results in a network with 807,700 parameters. I train each model for 150 epochs at most and highlight the best based on the reconstruction loss on the test set. Just for fun, I sweep across different standard deviation parameterizations and learning rate warmup strategies.
| Std. Dev. Param | Warmup Steps | Test Recon. Loss | Test KL Loss | Test Total Loss |
|---|---|---|---|---|
| Log-Variance | 0 | 140.88 | 6.96 | 147.84 |
| Log-Variance | 600 | 141.41 | 6.63 | 148.04 |
| Softplus | 0 | 141.51 | 6.56 | 148.07 |
| Softplus | 600 | 140.37 | 6.67 | 147.04 |
| Bounded Std. Dev. (10) | 0 | 140.96 | 6.82 | 147.79 |
| Bounded Std. Dev. (10) | 600 | 141.78 | 6.68 | 148.45 |
From this summary table, all three parameterizations work well. The differences in final loss values are quite small. This could be due to the simplicity of the dataset and model architecture, further amplified by forcing the network to compress images into a very low-dimensional latent space (2D).
Since the softplus parameterization with learning rate warmup achieved the best reconstruction loss, let’s visualize some of its training dynamics and results more closely.
Loss Dynamics
To understand the VAE’s behavior, we must look at the ELBO and its two components: the Reconstruction Loss and the KL Divergence.



These plots reveal a clear narrative:
- Rapid Initial Learning: Performance skyrockets in the first ~15 epochs.
- Overfitting: The Reconstruction Loss (middle) flatlines for the test set while continuing to improve for training, a classic sign of memorization.
- The Balancing Act: The KL Divergence (bottom) initially rises (“The Cost of Learning”) as the model stretches the latent space to encode digits, then saturates.
- Equilibrium: The total ELBO (top) improves slowly, driven by the model finding the optimal trade-off between reconstruction and regularization. Notice that Test and Train KL tracks closely: a sign of good regularization!
Visualizing the VAE Trade-Off: BCE vs. KL
While the line plots visualize progress over time, they miss the evolving relationship between our two competing objectives.
A VAE is fundamentally a multi-objective optimization problem. We want to:
- Minimize Reconstruction Loss (BCE)
- Minimize KL Divergence
Combining them as the ELBO is common and effective, though it can mask some of the underlying dynamics.
These two goals are in direct conflict. To get perfect reconstruction (BCE = 0), the encoder would need to “memorize” each input, mapping it to a unique, precise point in latent space. This would cause the KL divergence to skyrocket, as these specific, “pointy” distributions are nothing like our smooth N(0, 1) prior.
Conversely, to get perfect KL divergence (KL = 0), the encoder must always output N(0, 1), regardless of the input. This perfectly matches the prior. Since the latent code $\mathbf{z}$ now contains zero information about the input $\mathbf{x}$, the decoder can only learn to output the “average” image, resulting in terrible reconstruction.
The training process is a search for the best compromise.

This plot shows the test set’s BCE (y-axis) vs. KL Divergence (x-axis) at every evaluation step. The color gradient from cool (blue) to warm (red) represents the training progress from Epoch 0 to 150.
Here’s how to interpret this training path:
The Start (Green Diamond, ~Epoch 0): The model starts at the top-left.
- High BCE (Reconstruction): The decoder is random and hasn’t learned to reconstruct anything. Reconstruction is terrible.
- Low KL Divergence: The encoder is also random. Its output distributions $q_{\phi}(\mathbf{z} | \mathbf{x})$ are a random mess. On average, this “mess” is coincidentally close to the “mess” of the prior $p_{\theta}(\mathbf{z})$, so the KL penalty is low. The model isn’t encoding any useful information yet, so it’s not paying a high price for it.
Phase 1: The Initial Plunge (Blue Path): The path moves almost straight down.
- BCE Plummets: The model’s first and easiest task is to learn to reconstruct something. The optimizer finds massive, easy gains by making the decoder output “blurry digits” to replace the initial noise.
- KL Stays Low: The model achieves this huge reconstruction win without needing to learn a very complex latent space. It’s the “low-hanging fruit” of training.
Phase 2: The Trade-Off (The “Elbow”): The path stops dropping vertically and starts moving to the right and down.
- “Spending” KL to “Buy” Reconstruction: This is the true VAE trade-off in action. The easy wins are gone. To make the reconstructions sharper and more accurate (lowering BCE further), the model must now learn a more complex, informative latent representation.
- It “stretches” the latent distributions $q_{\phi}(\mathbf{z} | \mathbf{x})$ to encode more details about each specific digit. This “stretching” moves it further from the simple
N(0, 1)prior, and the KL divergence (the “cost”) goes up.
The End Game (Red Path & Star): The path settles in the bottom-right corner.
- Finding the “Elbow”: The model finds an equilibrium. It has pushed the KL divergence as high as it’s “worth” for the reconstruction gains it gets. Trying to get even better reconstruction (moving further down) would cost an enormous, disproportionate amount in KL divergence (moving far to the right), and the total loss would increase.
- Best Recon (Orange Star): The best reconstruction model (Epoch 118) is found right at this “elbow,” representing the best-found balance point on the trade-off frontier.
This single plot visualizes the entire training dynamic as a journey along the Pareto frontier: the set of optimal solutions where you can’t improve one objective (BCE) without worsening the other (KL).
Generative Performance
Let’s take a look at how well this model can decode samples.
Reconstruction Performance

Immediately, we see a couple of key points:
- Reconstructions are quite blurry compared to the originals. This is expected given the low capacity of the model and the extreme compression into a 2D latent space. General structure is typically preserved, while fine details are lost.
- The network struggles with 4s and 9s, often mixing them up or producing ambiguous shapes. This is a common failure mode in MNIST models due to the similarity of these digits.
Sampling from the Prior

If we sample from the prior N(0, 1) and decode those samples, we get a variety of digit-like images. From this, we get a pretty rich representation of digits. Almost all digits appear to be featured in this random sampling. Again, we see the standard blurriness.
Sweeping the Latent Space

We can select two points at random (here, two zeros), embed them into our latent space and then walk across that latent space to interpolate between two data points. Here, we see a walk that takes us from a zero that is askew to one that is more upright.

Finally, we can also sweep each latent dimension independently to see how they affect the generated images.
- Sweeping
z_1(top row), we see a 5 become an 8 and then a 9. The slant shifts from left to right as we sweep the dimension. - Sweeping
z_2(bottom row), we see a 4 become a 9 and then an 8. Then it becomes a 3, a 2, some nonsense, and a 6.
So clearly each latent dimension is encoding some high-level features of the digits, and we can manipulate those features by moving in latent space.
Inspecting the Latent Space
What does the actual latent space look like?

Even without class information, the network organizes the latent space to encode digit structure effectively. It also becomes immediately apparent why 4s and 9s are so confused by the model. That region is a dense mixture of the two.

We can also look at the marginal distributions of each latent dimension to see how well they match the prior N(0, 1). Here, z_1 is closer to the prior than z_2. z_2 exhibits a bimodal marginal distribution, indicating that the encoder is using this dimension to separate two distinct clusters of data.
We also might want to understand how the log-variance of the latent distributions behaves.

For the most part, we see similar concentration. Some digits are more concentrated than others, though in general the difference is slight.
Beyond 2D: Higher-Dimensional Latent Spaces
What happens as we increase the latent dimensionality? We must do dimensionality reduction to visualize latent spaces, giving us an approximate sense of how the latent space is organized.
| Latent Dimensionality | Test Recon. Loss | Test KL Loss | Test Total Loss | KL per Dim | Active Dims (KL > 0.1) |
|---|---|---|---|---|---|
| 2 | 140.37 | 6.67 | 147.04 | 3.34 | 2 |
| 4 | 114.94 | 10.61 | 125.56 | 2.65 | 4 |
| 8 | 89.46 | 16.84 | 106.31 | 2.11 | 8 |
| 16 | 76.57 | 23.65 | 100.21 | 1.48 | 16 |
| 32 | 74.65 | 25.59 | 100.25 | 0.80 | 24 |
As we double the dimensionality, we see a dominant trend at first:
- The reconstruction loss goes down
- The KL loss goes up
- The KL loss per dimension goes down
Something odd happens when we jump from 16 to 32 latent dimensions: some of our latent dimensions become degenerate and stop encoding useful information. This could be an indication we need to choose our hyperparameters a little more cautiously. Perhaps we need a different architecture. Or maybe there is an intrinsic limit to the dimensionality needed for this dataset past which it’s not really helpful to keep scaling the latent dimension.
Training Dynamics

The training dynamics show the battle between reconstruction and KL divergence for different latent dimensionalities. As we increase the latent dimensionality, the oscillation in the KL divergence becomes more pronounced. Particularly chaotic is the $D=16$ case, which struggles to find a stable equilibrium. By the time we expand to $D=32$, the KL penalty seems to overpower the ability to encode information in the latent space, leading to many inactive dimensions. The drop in KL complexity has staircase-like steps without clearly gaining reconstruction ability.
Reconstruction and Generation
As we increase the latent dimensionality, the reconstruction quality improves significantly.

As we increase the dimensionality, we see the increase in quality we’d expect given the reduction in BCE reconstruction loss. In the jump to 4D, we’re able to better resolve the differences between 4s and 9s. Images become much sharper by the time we hit 16 dimensions. The differences between 16 and 32 dimensions, however, are marginal.

Sampling quality also improves with latent dimensionality. Images are sharper as we increase the dimensionality. However, the space seems to get sparser as we increase to the largest dimensionalities, which makes sense given the size and nature of our dataset.
Latent Space Visualizations

The challenge with visualizing higher-dimensional latent spaces is that we must reduce their dimensionality to 2D. PCA struggles to capture the variance of higher dimensionalities. The 4D and 8D plots suggest increasingly better separation of the numeric classes. However, the 16D and 32D plots only show 10-20% of the variance and give a misleading image of overlap.
Conclusion
In this tutorial, we’ve journeyed from the core theory of Variational Autoencoders to a practical, modern PyTorch implementation and a series of experiments on the MNIST dataset. Our findings highlight several key takeaways for practitioners:
The VAE is a Balancing Act: The fundamental tension between reconstruction fidelity and latent space regularization is the core of the VAE. Our visualization of the BCE vs. KL loss trade-off clearly showed training as a search for an optimal point on this Pareto frontier, where improving one objective necessarily means sacrificing the other.
Latent Dimensionality is a Critical Hyperparameter: Increasing the latent dimension consistently improved reconstruction quality with diminishing returns. As we saw in the jump from 16 to 32 dimensions, too much capacity can lead to “inactive” dimensions, where the KL penalty overpowers the model’s ability to encode useful information. This demonstrates that choosing the right latent size is crucial for both performance and efficiency.
VAEs Learn Meaningful Unsupervised Representations: Without any labels, our VAE successfully organized the latent space, clustering similar digits and enabling smooth interpolations. This underscores the power of VAEs for unsupervised learning, dimensionality reduction, and discovering the underlying structure in complex data.
Implementation Details Matter: While different standard deviation parameterizations yielded similar results on this simple problem, understanding their gradient behaviors is key for tackling more complex datasets where training stability can be a major challenge. Proper loss scaling is similarly crucial to prevent one term from dominating the other and leading to issues like posterior collapse.
While the classic VAE produces characteristically blurry reconstructions, it remains a foundational generative model. The principles we’ve explored here (the ELBO, the reparameterization trick, and the trade-off between reconstruction and regularization) are central to many more advanced generative models used today.
Questions or feedback? Feel free to reach out. I’d love to hear about your experiences with VAE experiments!